 アルゴンらんぷ
アルゴンらんぷ
どうも、チ〇ポです。
突然ですがみなさん、「このチ〇ポを勃たせてください」と言われたらどうしますか?
世界で初めてアメリカ大陸を発見した偉人、コロンブスならばこうしたことでしょう
見事に立(勃)ちました、有名なコロンブスのチ〇ポですね。
簡単すぎたのでち〇ぽを改造して少し難易度を上げてみましょう
~~~ち〇ぽ改造中~~~

~~~ち〇ぽ改造、完了~~~

チ〇ポに車輪が付きました。
この車輪付きチ〇ポも改造前と同じように立たせてみましょう

このように車輪付きチ〇ポは重力によって引っ張られ倒れてしまいます。俗に言う勃起不全ですね。
しかし、男としてやはりチ〇ポにはそびえ立っていてほしいもの
今回はこのチ〇ポをあらゆる知識や技術を駆使して立たせたいと思います。
チ〇ポの立たせかた
いきなりチ〇ポを立たせるのは難しいので、似た現象から考えましょう。
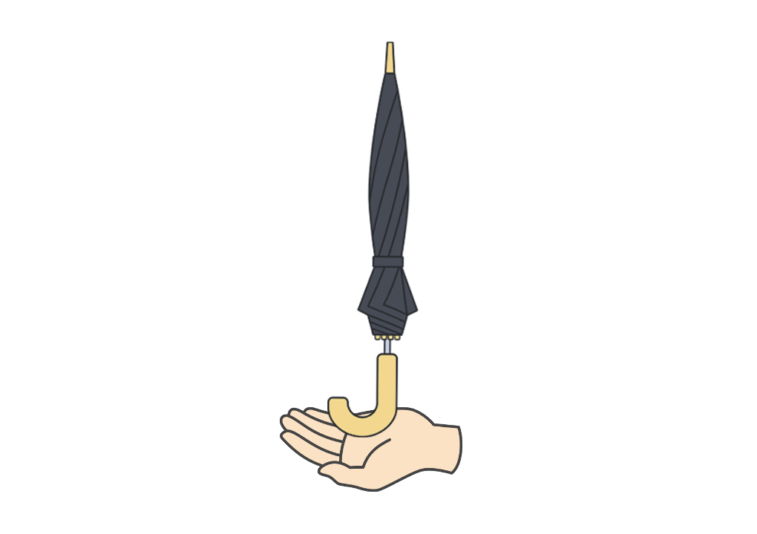
立たせるといえばみなさん、傘や箒を手のひらの上で立たせるという謎の遊びをしたことがあると思います。ない人はやってみてください。
そのとき無意識的にこんな動きをしているはず
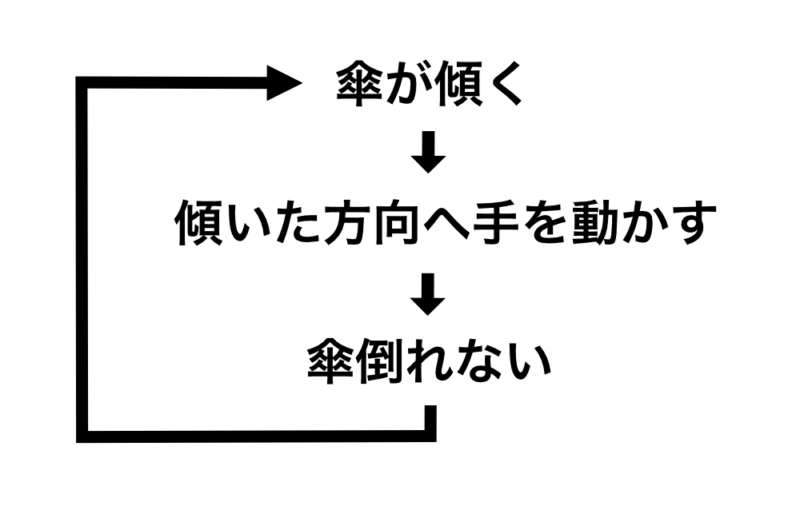
傘とチ〇ポの違いは形状や重さ、金玉がついているかどうか程度。ならば全く同じ原理でチ〇ポも立たせることができるはず…!!
つまりこう!
チ〇ポが前に傾く → チ〇ポ前進
チ〇ポが後ろに傾く → チ〇ポ後退
の動作を繰り返すことでチ〇ポの勃起状態を維持できるという寸法です。
すなわちチ〇ポを立たせるのに必要な要素は
①チ〇ポ角度を測定するセンサ
②チ〇ポを前進/後退させるモーター
③チ〇ポ角度に応じてモータへ動かす命令を送る頭脳
の3つ。さっそくチ〇ポに搭載しましょう
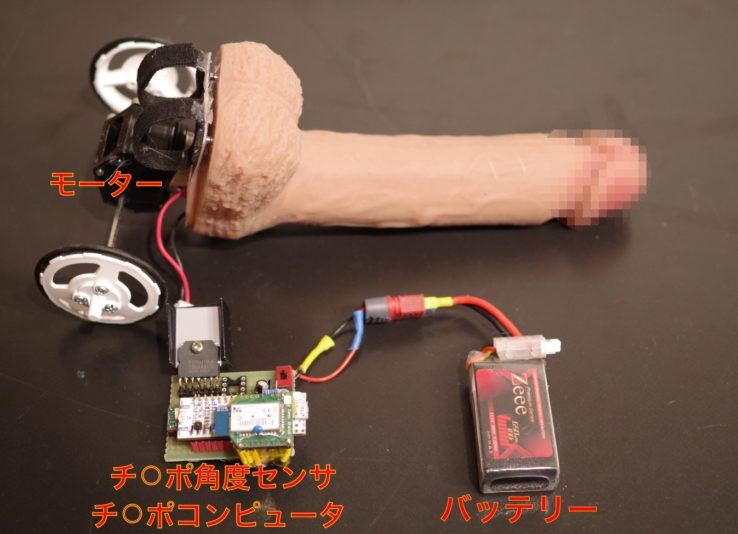
できました。
頭脳の部分には小型のコンピュータを使います。
システムも出来上がり、さっそくチ〇ポを立たせていきたいところ… しかしここで一つ大きな問題があります。
「チ〇ポコンピュータはプログラム通りにしか動かない」という点です。
人が手で傘を立たせたときは傘が倒れそうになったら手を「いい感じに」に動かすことで傘を立たせることができました。しかしコンピュータには「いい感じに」が伝わりません。
つまりチ〇ポ角度に応じてチ〇ポモータをどのくらい動かせばいいかをこちらで考えてあげる必要があります。さらにそのためにはチ〇ポの物理的な挙動を理解しなければいけません。チ〇ポ物理学の幕開けです。
チ〇ポ物理学
ち〇ぽの挙動を物理学で完全に解き明かします。
ここからはかなり難しくなるのでつらい人は飛ばしてください。
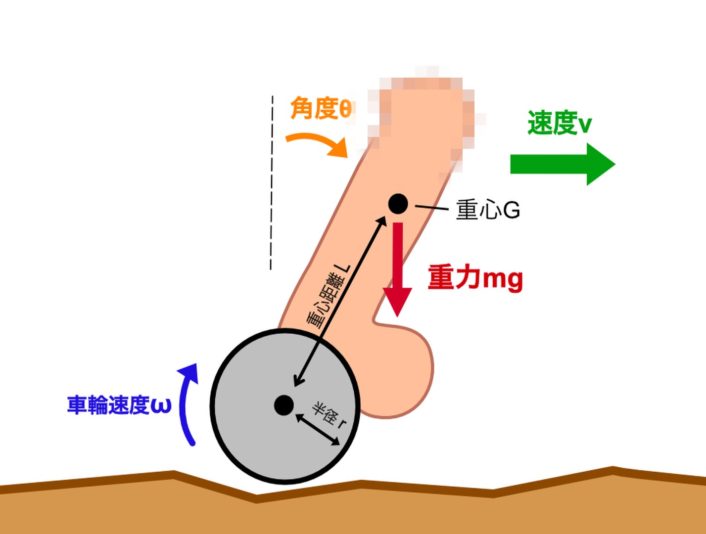
まずチ〇ポに働く力や座標系をまとめると図のようになります。ここからチ〇ポの動きを表す運動方程式を求めましょう。
※運動方程式:物理学においてある物体の運動を決定する方程式のこと
運動方程式といえばニュートンの運動方程式がまず頭に浮かぶと思いますが、チ〇ポは回転と前後移動の2要素があり面倒なことになります。そのため今回はラグランジュ方程式という高級下着ブランドみたいな名前の式を使います。
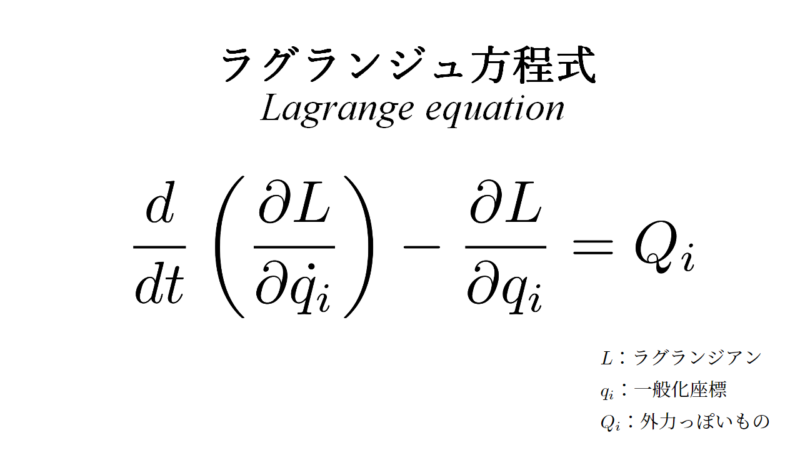
この方程式は物体の位置エネルギーと運動エネルギーさえわかってしまえば運動方程式が求められるというスゴイやつです。なのでまずチ〇ポの運動エネルギーTと位置エネルギーU(チ〇ポテンシャルエネルギー)を求めましょう。
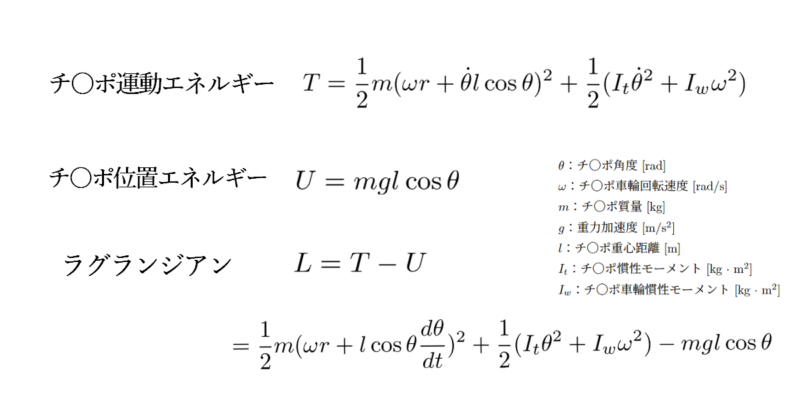
図からち〇ぽの運動エネルギーと位置エネルギーはこうなります(運動エネルギーは質量×速度の二乗÷2、位置エネルギーは質量×重力加速度×地面からの高さ)。
これらの差分をとることでラグランジアンLが求められました。
Q. ラグランジアンってなんですか?
A. わかりません
ともかくこのラグランジアンをラグランジュ方程式へ代入し、一般化座標であるθとωで偏微分したり時間微分することでチ〇ポの運動方程式が求められます。
こうして求めたチ〇ポ運動方程式がこちら…
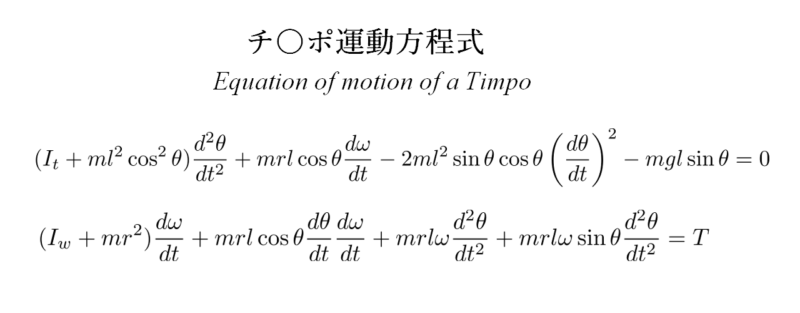
これがチ〇ポの挙動をすべて書き記した方程式…この世のすべてのチ〇ポはこの法則に支配される…
式をよく見てみるとsinやcosといった三角関数や微分がたくさん登場しています。もうお分かりですね。
みなさんが三角関数と微分を高校で勉強した理由、それはチ〇ポの動きを理解するためだったのです。
チ〇ポ運動方程式がわかったので勃起チ〇ポまであと一歩です
チ〇ポ工学
チ〇ポを立たせるための具体的な方法を考えていきましょう。
チ〇ポ運動方程式はθとωの微分方程式になっていて、実は微分方程式で書けるモノの98割はPID制御という技術を適用することで自在に扱えることがわかっています。PID制御とはこんな式で書かれるもので
※微分方程式:未知関数とその導関数の関係式として書かれている方程式
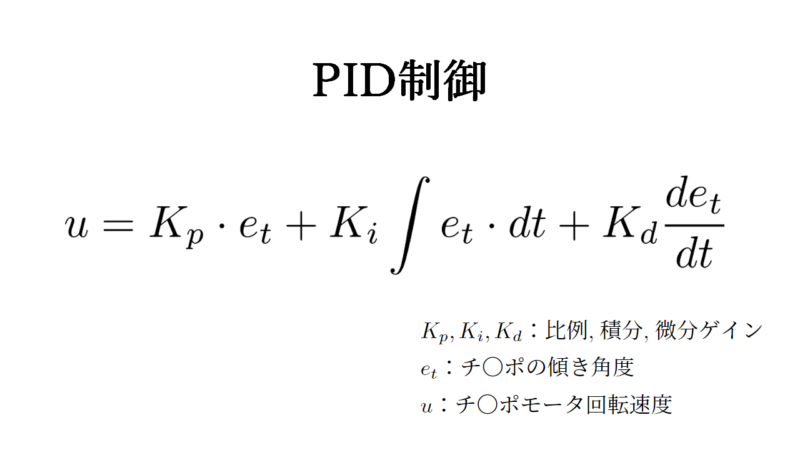
めちゃ難しそうですが「チ〇ポの傾きが大きいほどチ〇ポモータをいっぱい動かそう!!」を大げさに書いてるだけです。これがチ〇ポ角度に応じてチ〇ポモータをどのくらい動かせばいいかの答えです。
このPID制御をチ〇ポコンピュータが行うことでチ〇ポを立たせることが可能となります。
最終的にチ〇ポ立たせるシステムの流れはこう
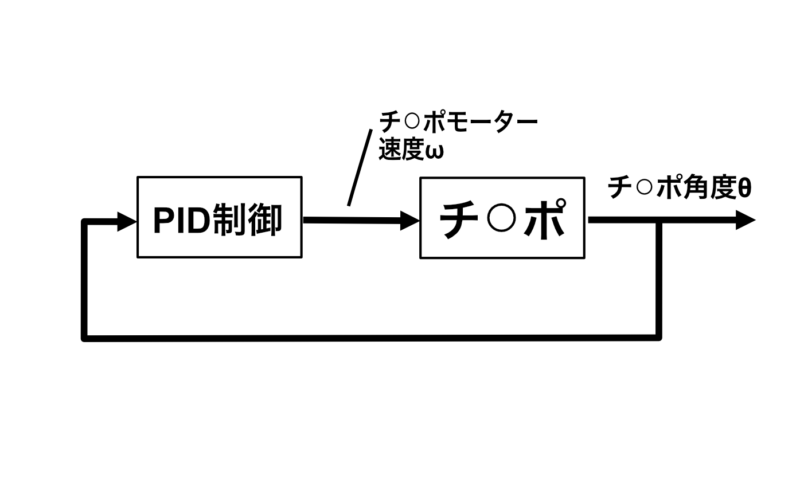
シンプルですね。
ちなみにチ〇ポ角度を測定し、その傾きに応じてチ〇ポモータへ指令を送るという流れを専門用語でチ〇ポ角フィードバック制御と呼びます。覚えておきましょう。
なぜこれでチ〇ポを立たせられるのか一応解説すると…
図ではPID制御とチ〇ポがつながってループを形成しています。PID制御はもともと数式で定義されたもので、チ〇ポは先ほど計算したチ〇ポ運動方程式通りに動きます。ということはチ〇ポシステム全体が数式で書けるようになっていて、この数式を解けばチ〇ポが立つ(θ=0°を維持する)のに必要な条件を計算できてしまうわけです、数学ってスゲー。実際にはチ〇ポが立つようにPID制御のKpとかその辺を計算で求めます。
…..。
~ 難しい話おわり!!~
さっさと立たせましょう、チ〇ポを
はたしてチ〇ポは立つのか
ついにチ〇ポを立たせる時が来ました。
ちんぽを専用のレールにセット。今回は勃起状態を維持するPID制御だけでなく、下向き萎えチ〇ポ状態からチ〇ポを振ることで勃起させる振りチ〇コントロールも同時に行います。
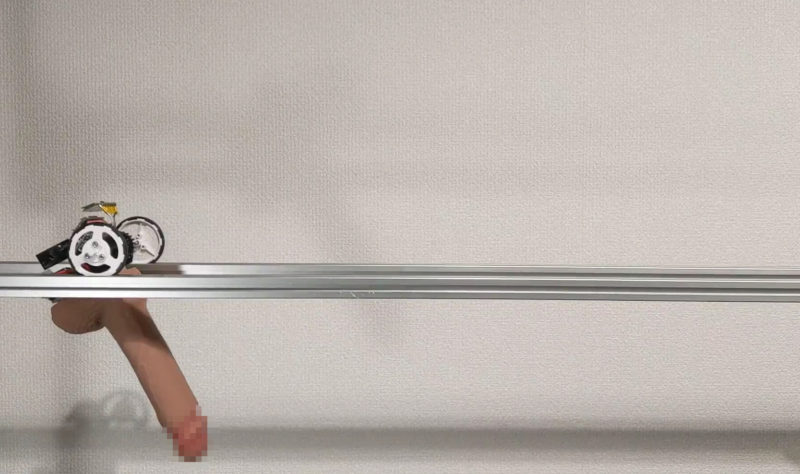
チ〇ポコンピュータには計算で求めた制御プログラムを書き込んであります。これでチ〇ポは理論上絶対に立つはず…!!
チ〇ポの電源を投入すると…

動いたっ
ぶんっ ぶんっ
立っ…
回っちゃった

立つどころかおち〇ぽ大車輪を披露してしまいました。
失敗した理由はおそらく
・チ〇ポが思ったよりフニャチン
・チ〇ポ車輪の滑り
・温度変化やブラシ劣化によるチ〇ポモータ特性の変化
・あらゆる非線形性
このあたりの要因が重なったためと思います。
チ〇ポ運動方程式を修正すべきですが、これらすべての要素を数式で書き加えるのはぶっちゃけ不可能です。
Q. じゃあどうやって立たせるの?
A. 職人芸
ということでここからは何も考えずトライ&エラーによる微調整でチ〇ポを立たせます。
調整中…
どこいくねーーん
あとちょっと…
さらに調整を繰り返すこと数週間…
ついに…
その時が…
やってきた…

ふんっ ふんっ
ぶおんっ ぶおんっ
立っ…

立ったぁあああああ!!

完璧に勃起しているッ!!
つんっ
セーフ
つんっ つんっ
セーフ

あっ
ということで知識と技術と気合で無事にチ〇ポを勃たせることができました。
このように物理や数学はチ〇ポの役に立つのでみなさんも勉強してみてはどうでしょう
おわり




 逆襲
逆襲

 たかや
たかや
 オモコロ編集部
オモコロ編集部
 ビタパン
ビタパン

 宮本牛乳
宮本牛乳
 めいと
めいと

 愛のサダ
愛のサダ
 ナ月
ナ月
 サイケ蟹光線
サイケ蟹光線
 八羽
八羽








